- 找服务
- 找公司
所有地区

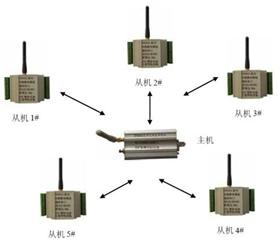
自动化小车的无线遥控驾驶技术研究 关键词:自动化小车,手动控制,无线监控 近年来,随着人工智能、系统科学以及各种传感技术的发展,智能的遥控移动机器人的应用范围越来越广泛。 远程遥控就要使用无线数传模块来控制自动化小车,本文用的无线数传模块是DTD433。 自动化小车的工作原理及系统结构如下图所示: 上图具体显示了自动化小车的系统结构原理,上位机通过无线数据传输模块将控制指令发送到主控制器中,主控制器再把指令发送给位置控制器,由位置控制器控制电机的转动速度,最后再把电机的信息反馈给上位机。实际应用中,小车的驾驶是通过鼠标,键盘来发送控制信息的,它们向上位机系统输入控制信息,控制小车的运动,控制信息经上位机系统处理后,传送到主控制器,来控制各电机的运行。 采用DTD433主要是因为它有如下优点: 微功率发射,DTD433A最大发射功率10mW,DTD433B最大发射功率是500mW。 ISM频段,无需申请频点。载频频率433MHz,也可提供315/868/915MHz载频。 高抗干扰能力和低误码率。基于FSK的调制方式,采用高效前向纠错信道编码技术,提高了数据抗突发干扰和随机干扰的能力。 传输距离远。在视距情况下,模块天线安装位置离地面高度大于2米,DTD433A可靠传输距离可达300m,DTD433B可 靠传输距离可达1500m。 透明的数据传输,提供透明的数据接口,能适应任何标准或非标准的用户协议。自动过滤掉空中产生的假数据(所收即所发)。 多信道,标准配置提供8个信道,如果用户需要,可扩展到16/32信道。 满足用户多种通信组合方式: 双串口,3种接口方式。DTD433提供2个串口3种接口方式,RS232,RS485和TTL口。 DTD433B接口波特率为(9600~19200)bps,格式为8N1/8El用户自定义,可1次传输200Byte较长的数据帧,用户编程更灵活。(如果用户需要,也可1次传输无限长度的数据) 智能数据控制,用户无需编制多余的程序。即使是半双工通信,用户也无需编制多余的程序,只要从接口收/发数据即可,其它如空中收/发转换,控制等操作,DTD433自动完成。 低功耗及休眠功能。 多种天线配置方案,满足用户不同的结构需要。 DTD433支持点对点通信方式和点对多点的通信方式。 在后一种方式中首先需要设1个主站,其余为从站,所有站都编一个唯一的地址。通信的协调完全由主站控制,主站采用带地址码的数据帧发送数据或命令,从站全部都接收,并将接收到的地址码与本地地址码比较,不同则将数据全部丢掉,不做任何响应;地址码相同,则证明数据是给本地的,从站根据传过来的数据或命令进行不同的响应,将响应的数据发送回去。这些工作都需要上层协议来完成,并可保证在任何一个瞬间,通信网中只有一个电台处于发送状态,以免相互干扰。
搜索关键词:无线发射器
 |
| 商家:西安达泰电子有限责任公司 |

锟斤拷锟斤拷谋思锟斤拷 锟斤拷 锟斤拷系锟斤拷锟斤拷 锟斤拷 锟斤拷锟斤拷锟斤拷锟斤拷 锟斤拷 锟斤拷锟斤拷锟斤拷锟斤拷 锟斤拷 锟斤拷私锟斤拷锟斤拷 锟斤拷 锟斤拷锟斤拷锟斤拷锟斤拷 锟斤拷 锟斤拷站锟斤拷图
Copyright © 2011-2024 imosi.com. All Rights Reserved.
